



三軸水平旋轉定位器/焊接機器人定位器
技術參數
| 垂直翻轉三軸伺服定位器 | 水平旋轉三軸伺服定位器 | ||||||
| 序號 | 專案 | 範圍 | 範圍 | 評論 | 範圍 | 範圍 | 評論 |
| 1 | 額定負載 | 500公斤 | 1000公斤 | 在第二軸半徑 R400mm 範圍內 | 500公斤 | 1000公斤 | 在第二軸半徑 R400mm/R500mm 範圍內 |
| 2 | 主軸的標準迴轉半徑 | R1200毫米 | R1500毫米 | R1200毫米 | R1800毫米 | ||
| 3 | 副軸的標準迴轉半徑 | R400毫米 | R500毫米 | R400毫米 | R500毫米 | ||
| 4 | 第一軸翻轉角 | ±180° | ±180° | ±180° | ±180° | ||
| 5 | 第二軸旋轉角度 | ±360° | ±360° | ±360° | ±360° | ||
| 6 | 第一軸的額定上轉速度 | 50°/S | 24°/S | 50°/S | 24°/S | ||
| 7 | 第二軸的額定轉速 | 70°/S | 70°/S | 70°/S | 70°/S | ||
| 8 | 重複定位精度 | ±0.10毫米 | ±0.20毫米 | ±0.10毫米 | ±0.20毫米 | ||
| 9 | 位移框架的邊界尺寸(長×寬×高) | 2200毫米×800毫米×90毫米 | 3200毫米×1000毫米×110毫米 | 2200毫米×800毫米×90毫米 | 3200毫米×1000毫米×110毫米 | ||
| 10 | 位置轉換器整體尺寸(長×寬×高) | 4000毫米×700毫米×1650毫米 | 5200毫米×1000毫米×1850毫米 | 4000毫米×700毫米×1650毫米 | 4500毫米×3600毫米×1750毫米 | ||
| 11 | 第一軸旋轉的中心高度 | 1350毫米 | 1500毫米 | 800毫米 | 1000毫米 | ||
| 12 | 電源條件 | 三相 200V±10% 50Hz | 三相 200V±10% 50Hz | 三相 200V±10% 50Hz | 三相 200V±10% 50Hz | 附隔離變壓器 | |
| 13 | 絕緣等級 | H | H | H | H | ||
| 14 | 設備淨重 | 約1800公斤 | 約3000公斤 | 約2000公斤 | 約2000公斤 | ||
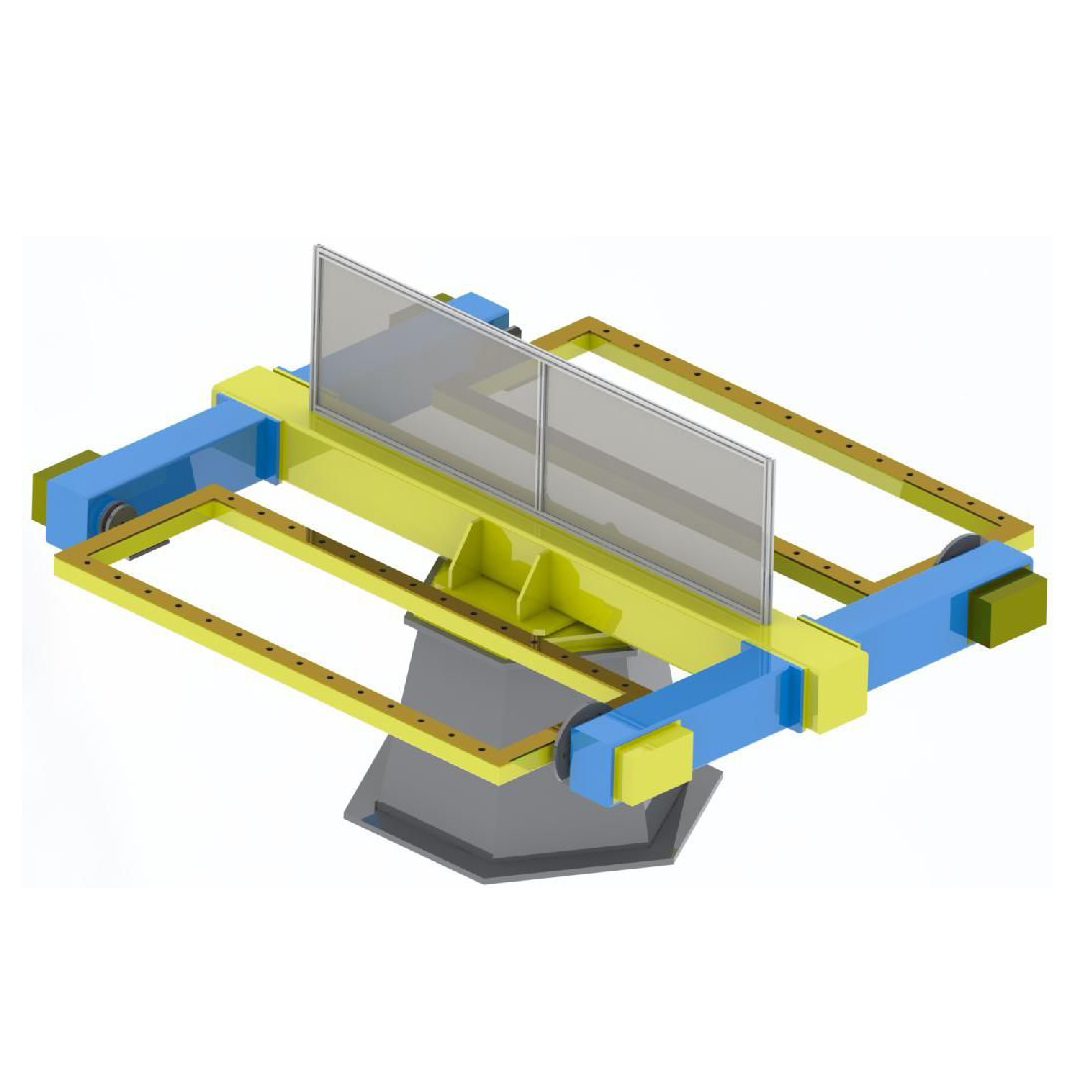
水平旋轉三軸伺服定位器

垂直翻轉三軸伺服定位器
結構介紹
三軸垂直翻轉伺服定位器主要由焊接整體框架、翻轉位移框架、交流伺服馬達和RV精密減速機、旋轉支架、導電機構、防護罩和電氣控制系統組成。
焊接一體成型框架採用優質型材焊接。經退火和應力消除處理後,由專業機械加工部門進行加工,以確保加工精度和關鍵位置的準確性。表面噴塗防鏽外觀漆,美觀大方,顏色可依客戶要求客製。
翻轉位移框架應採用優質型鋼焊接,並經專業機械加工。表面應加工有用於安裝定位工具的標準螺紋孔,並進行噴漆、發黑和防銹處理。
採用具有RV減速器的交流伺服馬達作為動力機構,可確保旋轉穩定性、定位精度和
使用壽命長,故障率低。導電機構採用黃銅材質,導電效果良好。導電底座採用整體絕緣設計,可有效保護伺服馬達、機器人和焊接電源。
此電氣控制系統採用日本歐姆龍PLC控制定位器,性能穩定,故障率低。電氣元件均選用國內外知名品牌,確保品質與使用穩定性。
遮光罩由鋁型材和鋁塑板組裝而成,用於防止焊接和切割過程中產生的電弧光。








